
機械工学よもやま話(1) ロボットの機構
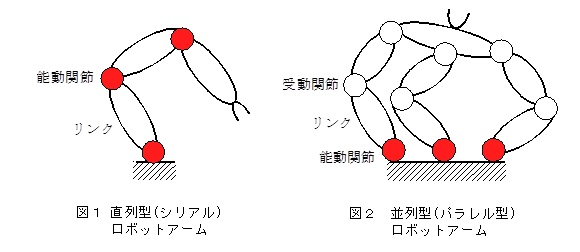
ロボットアームというと図1のような形を想像するのではないでしょうか.このように,リンクと関節が交互に線状につながった構造をもつロボットアームを直列型(シリアル型)といいます.工場などで活躍するロボットアームの多くが直列型です.ところで,直列型とは異なる図2のような構造を持つロボットアームがあるのを知っていますか?このようなロボットアームを並列型(パラレル型)といいます.
ロボットアームを動かすにはモーターなどを使って関節を駆動する必要があります.直列型アームの場合,全ての関節を駆動しなくてはなりません.駆動しない関節が1つでもあればフラフラしてしまいます.一方,並列型アームの場合,全ての関節を駆動する必要はありません.図2のアームの場合には9個ある関節のうちの3つの関節を駆動すればよいです.ここで,モーターなどによって駆動される関節のことを能動関節,駆動されない関節のことを受動関節といいます.
人間の腕はどうでしょうか?外見上は,「胴体→肩→上腕→肘→前腕→手首→手」と線状につながっているので直列型に見えます.人間の腕では,ロボットのリンクに相当するのが骨,モーターに相当するのが筋肉です.骨どうしが接する部分が関節に相当しますが,これらは受動関節です.受動関節を跨ぐように張られた多数の筋肉によって腕は駆動されるのです.受動関節が使われているのですから,構造的には,直列型というよりも並列型に近いと言えるでしょう.